משוואת קפלר
יש להשלים ערך זה: בערך זה חסר תוכן מהותי.
| ||
| יש להשלים ערך זה: בערך זה חסר תוכן מהותי. | |
במכניקה מסלולית, משוואת קפלר קושרת בין תכונות גאומטריות שונות של מסלולו של גוף הנתון להשפעת כוח מרכזי.
המשוואה נגזרה לראשונה על ידי יוהאנס קפלר ב-1609 בפרק 60 של ספרו אסטרונומיה חדשה, בעוד שבכרך החמישי של ספרו "הצגה של אסטרונומיה קופרניקאית" (1621) הוא הציע גם תהליך איטרטיבי לפתרונה. המשוואה מילאה תפקיד חשוב בהיסטוריה של הפיזיקה והמתמטיקה, במיוחד במכניקה שמיימית.
רקע: שלוש האנומליות
[עריכת קוד מקור | עריכה]
האנומליה הממוצעת היא היחס השברי בין הזמן שחלף מרגע אפס מסוים לבין זמן המחזור של תנועת הגוף במסלולו האליפטי, והיא מבוטאת כזווית היחסית לשבר זה. היא שווה לזווית שהיה מכסה הרדיוס הווקטור של גוף דמיוני שנע במסלול מעגלי עם אותו זמן המחזור כמו של המסלול האליפטי הנתון (מעגל עם קוטר השווה לאורך הציר הראשי של המסלול האליפטי הנתון). המהירות הזוויתית הממוצעת של הגוף היא:
ולכן האנומליה הממוצעת היא:
מה שנותן את הזווית שיוצר הרדיוס וקטור בזמן t עם זה שברגע .
האנומליה האמיתית לעומת זאת, היא פרמטר זוויתי אמיתי שמגדיר את המיקום של הגוף במסלול קפלרי. היא מוגדרת כזווית בין כיוון הפריאפסיס ובין המיקום הנוכחי של הגוף, כפי שהיא נמדדת במוקד הראשי של האליפסה (הנקודה סביבה הגוף חג). היא מסומנת בדרך כלל באחת מהאותיות v,θ או f.
האנומליה האקסצנטרית היא גודל שימושי בניתוח התנועה הרדיאלית (כלומר ניתוח השינוי ברדיוס התנועה שלו) של גוף המצוי בתנועה מסלולית. זהו פרמטר זוויתי המוגדר כך:
- ,
- ,
כאשר x ו-y הן הקואורדינטות של מיקום הגוף במסלול במערכת צירים שממורכזת במרכז האליפסה (לא במוקד שלה). זו למעשה הזווית שיוצר רדיוס מסוים של מעגל ברדיוס a (כאשר a הוא חצי הציר הראשי) עם כיוון הציר הראשי של המסלול, כאשר הרדיוס המסוים הוא זה שחותך את האנך לציר הראשי המורד מהנקודה ששיעוריה (x,y) בנקודה שנמצאת על שפת המעגל (ראו איור). אינטואיטיבית, אם מפרשים את התנועה המסלולית של הגוף כתנועה הרמונית הן בציר x והן בציר y (הפרש המופע בין התנועות בשני הצירים הוא ), אז האנומליה האקצנטרית היא המופע של תנועת הגוף באחד הצירים. כדי להבין את הקשר שלה לתנועה הרדיאלית של הגוף במערכת קוארדינטות שממורכזת במוקד האליפסה, נעזר במשפט פיתגורס כדי לחשב את אורך הקטע FP (הרדיוס וקטור):
לכן, הרדיוס (המרחק מהמוקד לנקודה P) קשור לאנומליה האקסצנטרית לפי הנוסחה:
אילו הגוף באמת היה נע בפוטנציאל הרמוני, את נוסחה זו ניתן היה לפרש כאילו הגוף מבצע תנודה רדיאלית הרמונית עם רדיוס ממוצע a, משרעת תנודה ae ומופע תנודה E. הגדרת האנומליה האקצנטרית שואבת השראה מן הדימוי הזה.
המשוואה
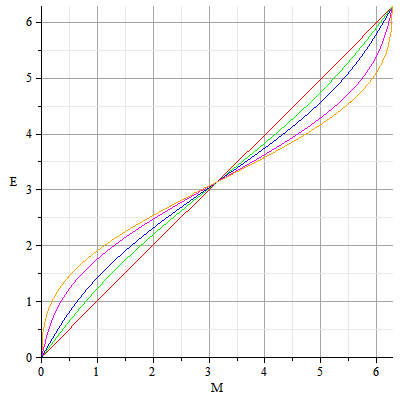
[עריכת קוד מקור | עריכה]משוואת קפלר היא:
כאשר M היא האנומליה הממוצעת, E היא האנומליה האקסצנטרית, ו-e היא האקסצנטריות. כיוון שהאנומליה הממוצעת יחסית לזמן שחלף מרגע ייחוס מסוים, ואילו האנומליה האקסצנטרית קובעת את מיקום הגוף במסלולו, משוואת קפלר למעשה קושרת בין מיקומו במסלול של העצם הנע לבין הזמן. את האנומליה הממוצעת ניתן לחשב לפי החוק השלישי של קפלר, שקובע כי זמן המחזור תלוי רק באורך הציר הראשי של האליפסה, בהתאם ליחס הפרופורציה .
האנומליה האקסצנטרית E היא שימושית בחישוב המיקום של נקודה שנעה במסלול קפלרי. אם למשל, הגוף חולף על פני הנקודה הקרובה ביותר למוקד (אשר הקואורדינטות שלה הן (x = a(1-e ו-y = 0 ) בזמן t = t0, אז כדי למצוא את המיקום בכל זמן נתון, יש לחשב תחילה את האנומליה הממוצעת M מהזמן ומהתנועה הממוצעת n לפי הנוסחה (M = n(t − t0, לאחר מכן יש לפתור את משוואת קפלר כדי לקבל את E, ולבסוף לחשב את הקואורדינטות ממנה:
כאשר a הוא חצי הציר הראשי ו-b הוא חצי הציר המשני.
משוואת קפלר היא משוואה טרנסצנדנטית מפני שפונקציית הסינוס היא פונקציה טרנסצנדנטית, ופירוש הדבר הוא שאם E הוא הנעלם, אז לא קיים לו פתרון אלגברי. אנליזה נומרית ופיתוחים לטורים אינסופיים נדרשים באופן כללי כדי לקרב את E.
גזירת המשוואה
[עריכת קוד מקור | עריכה]כדי לגזור את המשוואה, נתחיל מהקשר בין אורך הרדיוס וקטור (שמחבר נקודה על המסלול עם מוקד האליפסה) לאורך הציר הראשי, האקסצנטריות והאנומליה האקסצנטרית:
גזירת הביטוי לפי הזמן נותנת:
מצד שני, לפי משוואת האליפסה במערכת קואורדינטות גליליות הממורכזת באחד המוקדים, אורך הרדיוס וקטור מקיים:
כאשר היא זווית האנומליה האמיתית. גזירת הביטוי האחרון לפי הזמן נותנת:
מחוק השטחים השווים נקבל: , כאשר n היא המהירות הזוויתית הממוצעת , ולכן:
- .
השוואת הביטוי הזה עם הביטוי הראשון ל-'r נותנת:
מההגדרה של האנומליה האקסצנטרית נובע:
או:
אולם , ולכן ביטוי זה שקול ל-:
אינטגרציה לפי הזמן של הביטוי הזה נותנת:
מכיוון ש-E = 0 ברגע שהגוף נמצא בנקודה הקרובה ביותר מקבלים לבסוף את משוואת קפלר:
- .
ראו גם
[עריכת קוד מקור | עריכה]קישורים חיצוניים
[עריכת קוד מקור | עריכה]- משוואת קפלר, באתר MathWorld (באנגלית)