Tore de Clifford
En mathématiques, et plus particulièrement en géométrie, le tore de Clifford, nommé d'après William Kingdon Clifford, est le plongement le plus simple et le plus symétrique du 2-tore (c'est-à-dire du produit cartésien de deux cercles) dans l'espace R4.
Projeté dans l'espace à trois dimensions (par exemple en projection stéréographique) il conserve sa topologie (et peut même s'identifier au tore ordinaire), mais il est impossible de conserver son absence de courbure.
En prenant pour les deux cercles le rayon , le tore de Clifford peut s'identifier à un sous-ensemble de la 3-sphère unité ; on peut aussi le représenter dans le plan C2 comme l'ensemble des points dont les deux coordonnées sont de module 1.
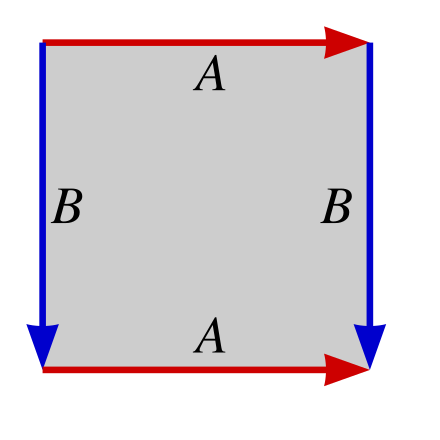
Le tore de Clifford est obtenu (en tant que variété riemanienne) en identifiant les bords opposé d'un carré ; la géométrie correspondante est donc euclidienne[1].
Définitions
[modifier | modifier le code]Produit cartésien
[modifier | modifier le code]Le cercle unité S1 dans R2 peut être paramétré par . Une autre copie étant paramétrée par un angle indépendant , on définit le tore de Clifford comme le produit cartésien , où le facteur assure que tous les points sont dans la 3-sphère unité S3.
Construction à partir des nombres complexes
[modifier | modifier le code]Dans le plan complexe C, le cercle unité peut se représenter par ; le tore de Clifford s'identifie donc au sous-ensemble de C2 ; autrement dit, ce sont les points de C2 dont les coordonnées (z1, z2) vérifient.
Autres paramétrages
[modifier | modifier le code]Le tore de Clifford peut également se paramétrer à l'aide des coordonnées de Hopf : tout point de la 3-sphère s'écrit , le tore correspond à et il partage la 3-sphère en deux régions isomorphes au tore plein : et , et transformées l'une en l'autre par la symétrie centrale .
Le calcul des dérivées partielles de ces paramétrages et l'équation d'Euler-Lagrange permettent de montrer que le tore de Clifford est une surface minimale de S3.
Définition générale
[modifier | modifier le code]Plus généralement, avec la représentation paramétrique précédente, les points de la 3-sphère ayant pour coordonnées , avec fixé différent de , forment encore un tore appelé souvent également tore de Clifford (mais ce n'est plus une surface minimale en général).
Tores de Clifford en dimensions supérieures
[modifier | modifier le code]La sphère unité S2n−1 d'un espace euclidien de dimension paire R2n (identifié à Cn) est l'ensemble des n-uplets de coordonnées complexes vérifiant Toute famille de nombres positifs r1, ..., rn tels que r12 + ... + rn2 = 1 définit alors un tore de Clifford généralisé par
- , certains de ces tores étant dégénérés si l'un des ri est nul ; l'ensemble de ces tores constitue une fibration de la sphère S2n−1.
Applications
[modifier | modifier le code]En géométrie symplectique, le tore de Clifford est un exemple de sous-variété lagrangienne de C2.
La conjecture de Lawson (en) affirme que tout plongement minimal d'un tore dans la 3-sphère est un tore de Clifford ; elle a été démontrée par Simon Brendle in 2012.
Voir aussi
[modifier | modifier le code]Références
[modifier | modifier le code]- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Clifford torus » (voir la liste des auteurs).
- (en) V. Borrelli, S. Jabrane, F. Lazarus et B. Thibert, « Flat tori in three-dimensional space and convex integration », Proceedings of the National Academy of Sciences, Proceedings of the National Academy of Sciences, vol. 109, no 19, , p. 7218–7223 (PMID 22523238, PMCID 3358891, DOI 10.1073/pnas.1118478109).