Elektrisk motor: Forskjell mellom sideversjoner
→3-fasemotorer: Presisering (forklaring i skjult tekst) |
|||
| Linje 51: | Linje 51: | ||
<!-- Vg. les innsigelsene på diskusjonssiden vedrørende "animasjonen" av en 3-fasemotor"--> |
<!-- Vg. les innsigelsene på diskusjonssiden vedrørende "animasjonen" av en 3-fasemotor"--> |
||
3-fasemotorer er børsteløse vekselstrømsmotorer som bruker 3-fasestrøm, altså vekselstrøm fra tre ledninger, der spenningen i hver ledning har samme frekvens, men alltid er i forskjellig fase. Poenget er at det til enhver tid er spenning mellom en av ledningene og de to andre, slik at energioverføringen på et 3-fasenett er konstant, og ikke avbrytes periodisk slik som med én-fasestrøm. (Betegnelsen ''enfase'' |
3-fasemotorer er børsteløse vekselstrømsmotorer som bruker 3-fasestrøm, altså vekselstrøm fra tre ledninger, der spenningen i hver ledning har samme frekvens, men alltid er i forskjellig fase. Poenget er at det til enhver tid er spenning mellom en av ledningene og de to andre, slik at energioverføringen på et 3-fasenett er konstant, og ikke avbrytes periodisk slik som med én-fasestrøm. (Betegnelsen ''enfase'' brukes om koblinger der en har tilkobling til et vekselstrømnett via kun to ledere. Noen vil hevde at én-fase skal brukes ved kobling mellom N-leder og en av faselederne i et [[TN-nett]]. Det er ikke så vanlig i Norge grunnet vårt [[IT-nett]]. Hos oss vil det være relevant å kalle det én-fase også når utstyret er koblet mellom 2 av de tre faseledernene.) 3 faser gjør at motoren tilføres en jevnere energi, noe gir et jevnere dreiemoment og som redurserer vibrasjoner (hastighetsvariasjoner) i motoren. |
||
<!-- Ang. den utbredte forvirringen omkring 1-fase kontra 3-fase: Fase og faseleder er to forskjellige ting. Fasen er spenningspotensialet MELLOM faselederne eller mellom faseleder og N. 2 faseledere (eller 1 faseleder og null-leder) gir derfor tilgang til kun én av fasene, mens 3 faseledere gir tilgang til alle 3 fasene --> |
|||
3-fasemotorer har en roterende magnet i midten av tre fastmonterte spoler. Sånn sett er de akkurat som de vanlige likestrømsmotorene med tre spoler, bare «vrengt» ut og inn, og de tre akselelektrodene er byttet ut med tre ledninger som går ut på et [[Ledningsnett|3-faseledningsnett]]. 3-fasemotoren vil alltid gå samme vei, men hvis man bytter om på to av de tre ledningene, vil den gå motsatt vei, på grunn av at det elektromagnetiske dreiefeltet inne i motoren da skifter retning. |
3-fasemotorer har en roterende magnet i midten av tre fastmonterte spoler. Sånn sett er de akkurat som de vanlige likestrømsmotorene med tre spoler, bare «vrengt» ut og inn, og de tre akselelektrodene er byttet ut med tre ledninger som går ut på et [[Ledningsnett|3-faseledningsnett]]. 3-fasemotoren vil alltid gå samme vei, men hvis man bytter om på to av de tre ledningene, vil den gå motsatt vei, på grunn av at det elektromagnetiske dreiefeltet inne i motoren da skifter retning. |
||
Sideversjonen fra 21. mar. 2008 kl. 05:15
En elektrisk motor, elektromotor eller elmotor er en motor som bruker elektrisk strøm til å skape roterende (vanligvis) eller lineær bevegelse. Bevegelsen skjer ved hjelp av kreftene som oppstår mellom en eller flere spoler og en eller flere magneter, når det går elektrisk strøm gjennom spolen(e), slik at spolene beveger seg i forhold til magnetene. Magnetene kan også erstattes av spoler eller superledende magneter hvis man vil spare vekt.
Motortyper
Likestrømsmotorer

Den enkleste utførelsen av en elektrisk motor er en topolet likestrømsmotor med permanentmagneter. Rotoren har to poler som magnetiseres av en elektrisk vikling, og en stator som er permanent magnetisert (N og S i figuren). Kommutatoren i sentrum av rotoren består i prinsippet av to halvsirkelformede kobberlameller som tilføres strøm via to børster (ofte av kull) og leder strømmen til viklingen. I figuren er rotoren magnetisert med Nord (Rød) og Syd (Blå). Rotorens nordpol vil frastøtes av statorens nordpol og tiltrekkes av statorens sydpol. (og omvendt for rotorens sydpol). Rotoren i figuren vil derfor rotere medurs. Når rotorens nordpol når fram til statorens sydpol ville den stoppet om ikke gapet i kommutatoren samtidig passerte forbi børstene, og strømretningen gjennom rotorviklingen snur. Dermed snur magnetiseringen av rotoren og polene er igjen frastøtende og rotoren fortsetter.
Denne enkleste løsningen har flere svakheter; Motoren starter ikke lett i en hvilken som helst stilling: Når rotorens poler står rett utenfor statorens poler kan den i prinsippe rotere kort i begge retninger, og har derfor ikke noe startmoment og et sterkt pulserende moment når den løper. Hvis ikke lamellene på akslingen har stort nok mellomrom mellom hverandre, vil de begge ha kontakt med de fastmonterte børstene samtidig og kortslutte disse. Dette problemet oppstår alltid hvis det er like mange lameller på kommutatoren som fastmonterte børster, noe som fører til at det blir like mange kortslutninger pr. omdreining som det er børster. Man vil derfor velge en løsning med flere poler (og lameller) enn børster. Med visse begrensinger i praktisk utførelse gir flere poler også jevnere dreiemoment.
En prakisk enkel elektrisk likestrømsmotor består derfor av tre poler på en aksling som får strøm fra tre lameller og to børster. Omkring de tre roterende spolene sitter to fastmonterte magneter. Dersom statoren også magnetiseres av en spole i stedenfor permanent magneter har man to måter å koble disse på:
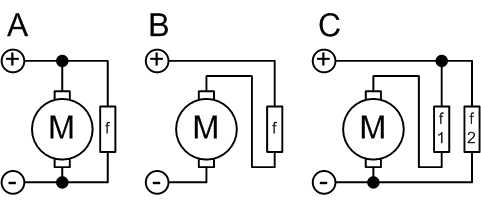
A: Shunt, B: Serie, C: Compound

- A: Parallell: Her er statoren og rotoren koblet hver for seg til strømforsyningen og kalles en shuntmotor. Magnetiseringen i stator blir dermed konstant og gir en motor med relativt stabilt turtall og dreiemoment.
- B: Serie: Om rotoren kobles i serie med statorviklingen får man en seriemotor der magnetiseringen av statoren øker når strømmen i rotoren øker. Praktisk betyr dette at når belastningen øker faller turtallet noe mens momentet øker. Dette er særlig brukt for traksjonsformål i f.eks. tog og elektriske kjøretøy.
- C: I en compoundmotor er det en kombinasjon av serie og parallell og lages for å gi en kombinasjon av egenskapene til disse koblingene.
Serie og shuntmotorer kan også brukes for vekselstrøm. Alle disse variantene er vanlige særlig innen billig husholdningselektronikk og leketøy; bor man i en vanlig norsk leilighet, har man sannsynligvis et tosifret antall elektroniske innretninger som fungerer på denne måten. Når strømmen endrer polaritet vender magnetiseringen både i rotor og stator. Ofte er det flere spoler jo større effekt (Watt) motoren yter; i en kraftig miksmaster kan det være f.eks. åtte spoler.
Vekselstrømsmotorer

I de fleste større elektriske motorer (og generatorer) for vekselstrøm er forholdene snudd i forhold til den enkle likestrømsmotoren som ble beskrevet over. Hoveddelen av energien omsettes av den stillestående statoren, mens rotoren bare krever magnetisering. Det betyr at den største energien ikke skal overføres over en kommutator.
En permanentmagnet likestrømsmotor vil gå den andre veien hvis man snur strømretningen. Strømmen som er lagt inn i et hus er vekselstrøm, og denne motortypen (som er beskrevet ovenfor) vil bare stå og vibrere hvis den tilkobles vekselstrøm. Det er flere måter å tilpasse den ovennevnte likestrømsmotoren til å bruke vekselstrøm:
- Den enkleste er å koble en likeretter mellom nettet og motoren slik at vekselstrømmen blir omformet til likestrøm før den går over på kommutatoren og gjennom spolene.
- En annen måte er å erstatte permanentmagnetene med spoler som beskrevet over; vekselstrømmen skifter retning 50 ganger i sekundet for en stikkontakt tilkoblet nettet, men alle magnetfeltene skifter retning samtidig. Ved å kaste ut de tunge permanentmagnetene blir motoren lettere, men bruker mer strøm og er dermed mindre effektiv. Det er vanlig i støvsugere, miksmastere og lignende husholdningapparater.
- Den tredje måten er å erstatte kommutatoren med sleperinger. Da må motoren være konstruert slik at den roterer med samme hastighet som nettfrekvensen delt på antall poler (for to poler 50 Hz / 2 * 60 s = 3000 o/min) Da vil rotoren endre polaritet for hver halve omdreining, fordi nettspenningen skifter polaritet. Dette virker bare når rotoren løper synkront med nettet, og slike synkronmotorer kan derfor ikke starte selv. De har ofte en hjelpestartvikling.
- Nyere trefasemotorer lages nå nesten bare som trefase kortslutningsmotorer. Her er det ingen sleperinger eller kommutator. Rotorviklingen består av en rotor med en enkel (kortsluttet) vikling, ofte støpt i ett stykke av aluminium i sporene i rotoren. Den kalles derfor ofte for et bur (en: squirrel cage). Hovedstrømmen går bare i statoren. Magnetiseringsstrømmen induseres i rotoren fra statorviklingen omtrent som fra primær til sekundærviklingen i en transformator. I en trefasemotor lager man også statoren slik at man får et roterende i stedenfor et pulserende felt (se figuren nedenfor) som gir et startmoment. For enfaset drift forsynes den ene tilkoplingen over en kondensator og gir en tilnærmet to- eller trefase. I kjøleskap og frysere er det asynkronmotorer som driver kompressorene som pumper kuldemediet rundt. Asynkronmotoren roterer noe saktere enn synkron hastighet, dette kalles sakking. Dreiemomentet øker med økende sakking til et punkt der motoren er overbelastet. Dreiemomentet faller da brått, og dette kalles kipping. Vridningen som er overdrevet i figuren gir et jevnere dreiemoment.
Startstrømmen i kortsluttmotorer er ganske høy og for å begrense denne kan man bruke viklet rotor og sleperinger. Man kobler inn en variabel effektmotstand over sleperingene under oppstart som kortsluttes når motoren går med full hastighet. Man kan også starte motoren med forskjellig kobling for å senke spenningen under oppstarten, såkalte 'stjerne-trekant vendere'. Disse metodene gir en mer komplisert motor og kabling og er stort sett erstattet av elektroniske mykstartere og frekvensomformere.
Andre konstruksjoner
Det lages en rekke spesielle varianter av elektromotorer. Noen av disse er:
- Børsteløse vekselstrømsmotorer kalles ofte motorer som har en eller flere spoler fast montert rundt en eller flere fastmagneter roterende på akslingen. Rotoren fungerer som en kompassnål som prøver å rette seg etter det stadig skiftende magnetfelte. Dette styres av elektroniske systemer som sender «bølger» av strøm rundt ringen av spoler. Dette kan sammenlignes med en fotballstadion der publikummet (spolene) «tar bølgen». Bølgene gjenspeiles i en magnetisk bølge som magneten snur seg etter. Dette systemet kan f.eks. styre strømmen med transistorer, som igjen styres av sensorer. Ofte er det vridde poler for jevn gange slik som for kortsluttmotoren over. Slike motorer brukes f.ek,s i mange apparater som krever presis styring som CD spillerens roterende aksel, men også for kompakte motorer med høy ytelse f.eks for elektriske modellfly og enkle vifter i datamaskiner. En slik vanlig viftemotor har fire fastmonterte spoler i midten av en ring av roterende fastmagneter. Her er det også et elektronisk system som snur strømmen hele tiden etter posisjonene som magnetene til enhver tid har.
- En variant av børsteløse vekselstrømsmotorer er stegmotorer. Her har man utpregede poler slik at motoren kan beveges i veldefinerte steg. Disse motorene lrever også eletronisk styring. Dette brukes spesielt for posisjonering som i skrivere, lesehoder i harddisker og cd spillere og lignende.
- Små synkronmotorer har en permanentmagnetrotor som roterer i et veselstrømsfelt. En slik motor vil starte i en tilfeldig retning, alltid gå like fort, og den vil snu hvis den møter sterk motstand. Dette kan brukes til å tvinge motoren til å gå i en fast retning ved å la den slå i en fjær hvis den starter i feil retning. Dette brukes for eksempel i mekaniske klokker med elektrisk drift.
- Skjermet pol er en variant som brukes for små vekselstrøms induksjonsmotorer. den ligner kortslutnings asynkronmotorer, men er enfaset, ofte med topolet stator og bruker en liten kortsluttet ring på enden av hver stator pol. Denne gir et lite forskjøvet magnetfelt (90 grader fase) som gir et tofaset magnetfelt og dermed dreiemoment. Brukes ofte i små apparater som vifter.
- Reluktans (Variabel eller svitsjet) motorer baserer seg på at en magnetisk krets alltid vil tilstrebe å stille seg slik at den får minst mulig magnetisk reluktans (magnetisk motstand). Her er ikke rotoren magnetisert, men vil allikevel stille seg inn mot statorpolene etterhvert som deres magnetisering varierer. I variabel reluktans induseres hvirvelstrømmer, f.eks i en aluminiumskive som bringes til å rotere. Dette brukes i mekaniske energimålere, reluktansmotorer er ellers lite vanlig.
- Servomotorer er en betegnelse på mange typer motorer, ofte med posisjonsgivere for bruk i regulerte systemer med tilbakekobling, for å stille posisjon hastighet, strekk osv. De er spesielt vanlige i fly (også modellfly), automatiske våpenstyringer, roboter og mange nyere biler.
3-fasemotorer
3-fasemotorer er børsteløse vekselstrømsmotorer som bruker 3-fasestrøm, altså vekselstrøm fra tre ledninger, der spenningen i hver ledning har samme frekvens, men alltid er i forskjellig fase. Poenget er at det til enhver tid er spenning mellom en av ledningene og de to andre, slik at energioverføringen på et 3-fasenett er konstant, og ikke avbrytes periodisk slik som med én-fasestrøm. (Betegnelsen enfase brukes om koblinger der en har tilkobling til et vekselstrømnett via kun to ledere. Noen vil hevde at én-fase skal brukes ved kobling mellom N-leder og en av faselederne i et TN-nett. Det er ikke så vanlig i Norge grunnet vårt IT-nett. Hos oss vil det være relevant å kalle det én-fase også når utstyret er koblet mellom 2 av de tre faseledernene.) 3 faser gjør at motoren tilføres en jevnere energi, noe gir et jevnere dreiemoment og som redurserer vibrasjoner (hastighetsvariasjoner) i motoren.
3-fasemotorer har en roterende magnet i midten av tre fastmonterte spoler. Sånn sett er de akkurat som de vanlige likestrømsmotorene med tre spoler, bare «vrengt» ut og inn, og de tre akselelektrodene er byttet ut med tre ledninger som går ut på et 3-faseledningsnett. 3-fasemotoren vil alltid gå samme vei, men hvis man bytter om på to av de tre ledningene, vil den gå motsatt vei, på grunn av at det elektromagnetiske dreiefeltet inne i motoren da skifter retning.
Både den enkleste mulige vekselstrømsmotoren og 3-fasemotoren er i prinsippet dynamoer; tilføres de mekanisk energi vil de lage elektrisk energi og omvendt, begge deler fungerer.
3-fasemotorer brukes vanligvis bare i større motorer i industrien, der virkningsgraden også er viktigere. Som alle andre børsteløse motorer kan 3-fasemotorer ha svært god virkningsgrad, omkring 98-99%
Høyspentlinjer har tre tykke ledere som frakter 3-fasestrøm (de to tynne øverst er bare jordete lynavledere eller kommunikasjonskabler). Det er fordi kraftverkene bruker 3-fasegeneratorer til å lage strømmen, som dermed blir 3-fase.
Variabel effekt
Effekten som trekkes av en elektrisk motor er gitt av lasten som er koblet til akslingen. Spenningen er vanligvis konstant, og dermed er det strømmen som varierer avhengig av lasten. En elektrisk motor trekker både aktiv og reaktiv effekt (kW og kVAR), hvor den aktive effekten brukes til å gjøre arbeid og den reaktive benyttes til å skape magnetiseringen i motoren som må til for å skape dreiemoment. Vektorsummen av disse bidragene kalles syneffekt eller tilsynelatende effekt og benenvnes S. , altså spenning ganger strøm. For trefase-motorer må også kvadratroten av 3 med.
Videre er aktiv effekt gitt av og reaktiv effekt .
Det er ingen prinsipiell forskjell på en elektrisk motor og en dynamo. Når en elektrisk motor går rundt, vil det induseres en spenning motsatt vei av den spenningen som tilføres motoren og som driver den:
Der
er indusert spenning
er fart
er flukstetthet
er lengden tråd som står vinkelrett på både B og v (= tykkelsen av spolen * antall viklinger)
Det er en teoretisk maksfart for elektriske motorer, hvor den induserte spenningen motvirker den tilførte, slik at det ikke går strøm og dreiemomentet er 0. Hvis motoren tvinges til å gå fortere enn dette, vil den drive strømmen motsatt vei. Elektriske motorer bruker mye strøm når de står stille, for da er strømmen gitt av motstanden i spolen (ingen induksjon), enda mer hvis motoren tvinges til å gå baklengs.
Moderne vekselstrømsmotorer benytter en frekvensomformer til å regulere turtallet på motoren. I mange bruksområder som pumper, vifter, kompressorer, vinsjer etc. kan dette gi et betydelig potensial for å spare energi. Det finnes flere typer omformere, men de mest brukte i dag består av avansert elektronikk.
For å regulere effekten av likestrømsmotorer, blir strømmen skrudd av og på i raske pulser av varierende lengde (Puls-bredde-modulasjon). En måte å lage slike strømpulser på kan være at en transistor trinnløst forsterker spenningen av et likerettet oscillerende signal som passerer en zenerdiode. Bare strøm med en viss spenning passerer zenerdioden, og det bestemmer varigheten av hver strømpuls. Til slutt forsterkes puls-strømmen av større transistorer. Slik pulsregulering er vanlig i forbrukerelektronikk og leketøy ettersom likestrømsmotorer er billige.