Kibó: Porovnání verzí
počeštění názvů částí |
m robot změnil: fr:Kibō (station spatiale internationale) |
||
| Řádek 47: | Řádek 47: | ||
[[fa:آزمایشگاه فضایی کیبو]] |
[[fa:آزمایشگاه فضایی کیبو]] |
||
[[fi:Kibō]] |
[[fi:Kibō]] |
||
[[fr:Kibō (station spatiale internationale)]] |
|||
[[fr:Japanese Experiment Module]] |
|||
[[hu:Japanese Experiment Module]] |
[[hu:Japanese Experiment Module]] |
||
[[it:Japanese Experiment Module]] |
[[it:Japanese Experiment Module]] |
||
Verze z 5. 1. 2010, 06:24

Kibó (japonsky: きぼう, anglický přepis: Kibō, česky: Naděje) je název japonského modulu, součásti Mezinárodní vesmírné stanice. Jednotlivé moduly startovaly ke stanici v roce 2008.
Složení modulu
Sestává ze čtyř částí: přetlakového modulu, venkovní plošiny, logistického modulu a manipulátoru
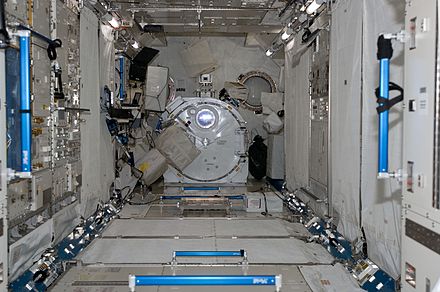
Přetlakový modul
Přetlakový modul (Pressurized Modul, PM) je základní částí. Má válcovitý tvar, je 11,2 m dlouhý a má průměr 4,4 m. Obsahuje 23 standardních přístrojových skříní, ze kterých je deset vyčleněno na vědecké experimenty.
Modul ke stanici dopravil raketoplán Discovery při misi STS-124 počátkem června 2008. Po připojení k ISS byl k hornímu portu PM připojen logistický modul (ELM-PS), viz dále.
Venkovní plošina
Venkovní plošina (Exposed Facility, EF) pro experimenty v kosmickém prostoru.
Logistický modul - přetlaková komora

Experimentální logistický modul (Experiment Logistics Module - Pressurized Section, ELM-PS) obsahuje přetlakovou část. Slouží jako podpůrný modul ostatním částem a jako skladiště.
Specifikace:
- délka: 3,9 m
- průměr: 4,4 m
- hmotnost: 4200 kg
ELM dorazil do Kennedyho vesmírného střediska 12. března 2007.[1] Do vesmíru modul odstartoval 11. března 2008 na palubě raketoplánu Endeavour při misi STS-123.[2] Kibō ELM byl 14. března vyzdvihnut z nákladového prostoru raketoplánu.[3] a v čase 4:06 UT byl připojen k hornímu spojovacímu uzlu modulu Harmony.
Po připojení hlavní části japonského komplexu - přetlakového modulu PM (Pressurized Modul) ke stanici v červnu 2008 byl ELM přesunut na jeho horní uzel.
Manipulátor
Manipulační zařízení (Remote Manipulator System, JEMRMS) je robotickým ramenem, obsluhuje venkovní plošinu a manipuluje s náklady.
Odkazy
Reference
- ↑ International Space Station Module From Japan Arrives at NASA [online]. NASA [cit. 2008-03-17]. Dostupné online. (anglicky)
- ↑ NASA's Shuttle Endeavour Begins Mission to the Space Station [online]. NASA [cit. 2008-03-17]. Dostupné online. (anglicky)
- ↑ NASA Assigns Crew for Japanese Lab and Canadian Robotics Mission [online]. NASA [cit. 2008-03-16]. Dostupné online. (anglicky)